Autonomous Forwarder Project
October 2021 revealed the world première of a self-driving forest machine which was able to work autonomously – it was able to collect and transport round wood without human intervention. The researchers behind the successful experiment saw it as a key step towards more sustainable forestry.
“This will redraw the map for the industry and how other players in the field view operations like these. We have worked extremely intensively with this test, and it feels exceptionally good that it works,” says Magnus Karlberg, professor at Luleå University of Technology.
In February 2024, the first real trials exploring the feasibility of autonomous forestry operations took place in Hörnefors in Västerbotten. The project was the result of a collaboration between Luleå University of Technology, the Swedish University of Agricultural Sciences, and the Cluster of Forest Technology. By being programmed to conduct the work on its own, the forest machine was able to pick up and transport logs to the intended pick-up point on its own. A job conducted by forwarder operators in machines built for the purpose, but this time people could stand on the sidelines and watch.
The AORO platform has been under development since 2014 as part of different projects of Luleå University (LTU) These projects included course projects in the mechanical engineering program, as well as masters’ and doctoral thesis. The mechanical design was developed with the intention of utilizing a wide range of readily available off-the-shelf components, aiming to reduce manufacturing and construction time. Components not found in the marketplace were manufactured in-house at a local workshop. It is important to note that no external companies had active participation in the engineering development of the AORO platform, making LTU the sole entity responsible for the machine’s construction.
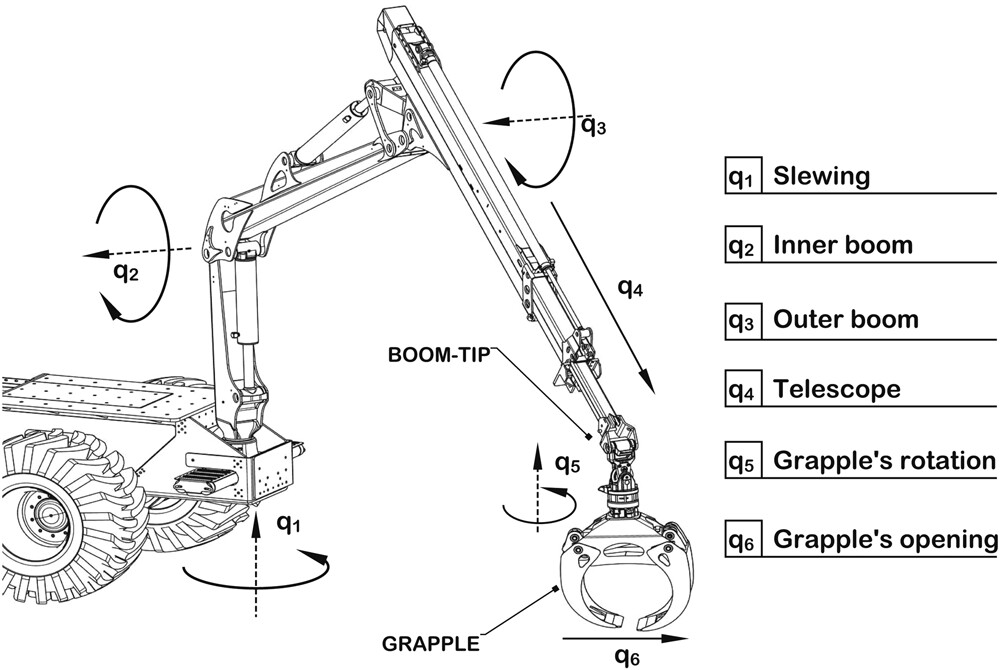
The AORO platform uses the FC8 crane made by CRANAB fitted with a CR250 grapple which has two active degrees-of-freedom for orientation and grabbing.
It is important to note that the grapple system is underactuated, meaning it lacks actuation at the attachment joint indicated as the boom-tip in Figure 2. This under actuation results in the grapple system exhibiting behaviour akin to that of a free pendulum.
-
That’s a remarkable amount of work hours for a single machine, the Norcar 600 owned by Erkki Rinne is taken well care of, it even has the original Diesel engine.
-
Kieran Anders is a forestry contractor working in the lake district. His work involves hand cutting and extracting timber using a skidder and tractor-trailer forwarder.
-
It is not possible to eliminate chain shot, but there are simple steps that can be taken to reduce the risk.
-
Arwel takes great pride in the fact that the mill has no waste whatsoever, “the peelings are used for children’s playgrounds, gardens and for farm animals in barns in the winter and the sawdust has multiple uses in gardens and farms as well.
-
Timber hauliers need to encourage young blood in, and also look after the hauliers we have, we need make the sector a safe and positive place to work.
FIND US ON
Related Posts
This FC8 crane belongs to a new line of products from CRANAB developed to support the introduction of smart crane functions in the industry. The distinctive feature of this crane is to have built-in analogue encoders as joint position sensors. At present, CRANAB and its partner companies don’t offer similar features for the grapple, as it is difficult to add sensors for measuring the rotation and the opening of the grab.
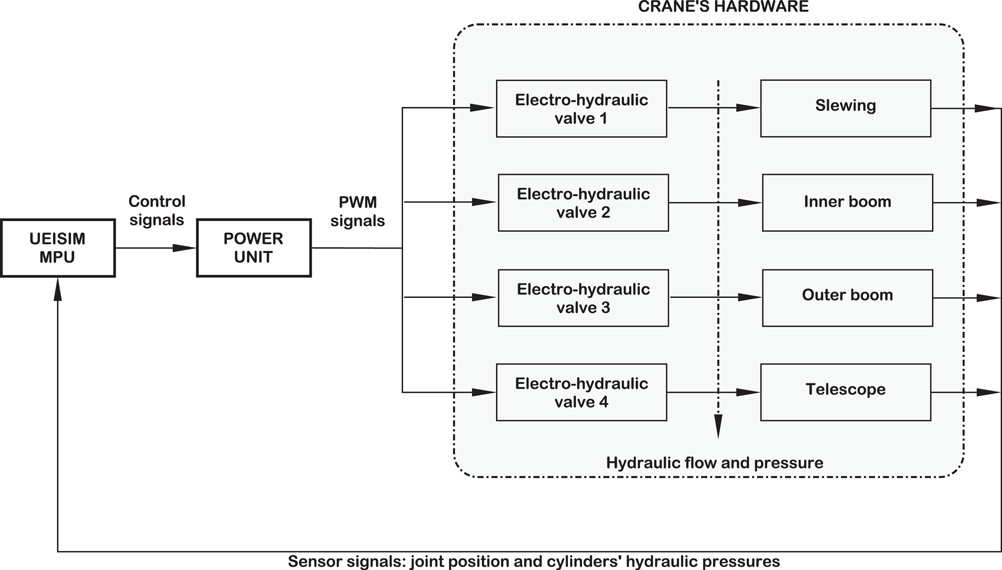
They equipped the electro-hydraulic valve with pressure sensors to measure pressure at each cylinder’s chamber. Referring to Figure 3, all sensors connect to the 18-bit DAC from the main UEISIM unit. The UEISIM is the main processor where all algorithms for motion control are applied. Therefore, the UEISIM unit is charged with providing the control signals to transform desired motion commands into mechanical motion by activating the hydraulic system.
Functionality and limitations
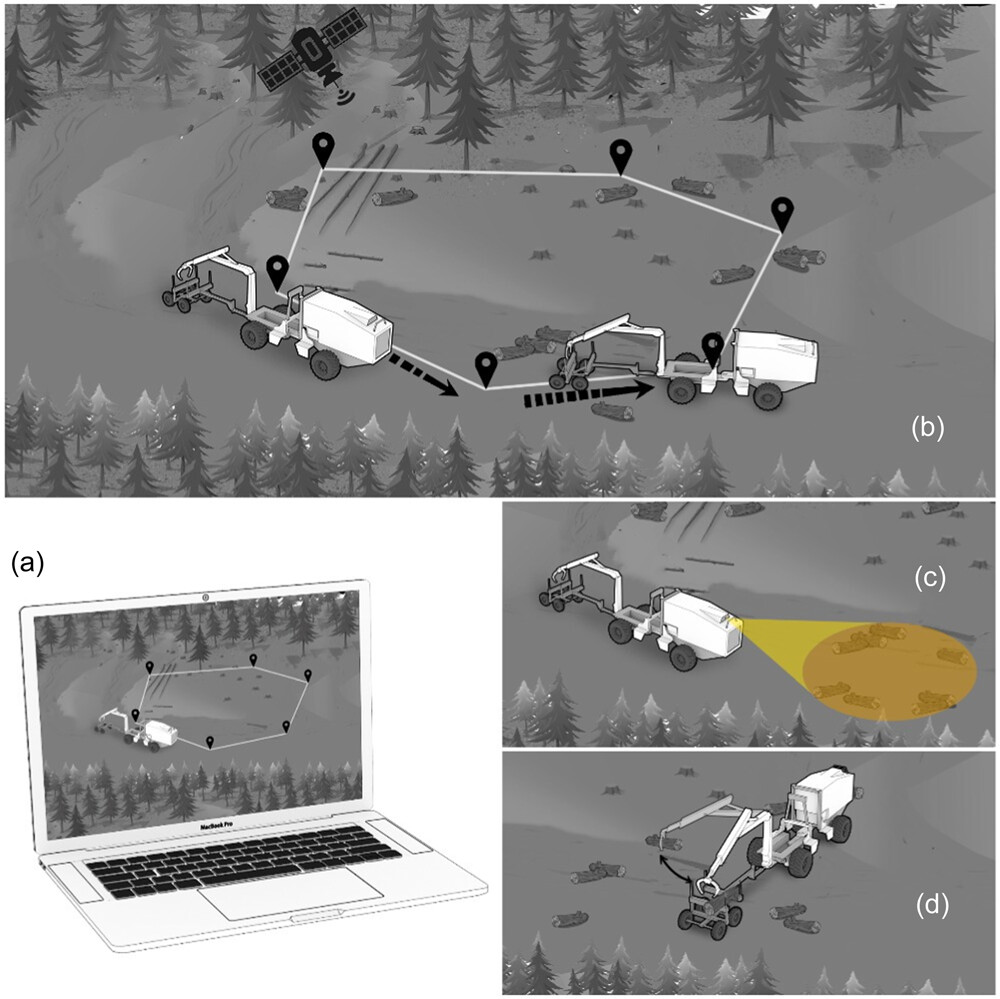
- Planning the mission
Referring to Figure 4a, at this stage, the human supervisor provides the route for the mission by defining GPS coordinates, which work as waypoints for autonomous navigation. These are set through a user interface that communicates wirelessly with the main Jetson computer. The logs to be loaded lay on the ground around this route in the crane’s reach.
2. Lifting the vehicle height for navigation
The pendulum arms for the wheels are initially on their lowest position. To initialize navigation, they are lifted to a drivability height, to easily traverse the forest over medium size rocks and stumps.
3. Autonomous navigation
Referring to Figure 4b, the machine starts traversing the forest at a constant speed of 2.3 km/h, using GPS information, according to the plan specified initially. As the terrain refers to clear-cut, no obstacles exist on these paths, a part of stumps and rocks that the vehicle can drive over.
4. Scanning for logs
Referring to Figure 4c, the system constantly scans for logs on the ground during vehicle navigation, using the stereo camera placed in front of the machine.
5. Stopping the vehicle at the logs to be loaded
Once a log or groups of logs have been found, the machine stops at 4 m to get a better visual recognition and positioning of the logs. This information is transferred to the machine’s coordinate system, which is used to provide coordinates to the crane’s motion control unit.
6. Placing the load bunk for collection
At this stage, the vehicle travels an average distance of 5 m passed the logs and stops at a distance where the logs lay almost next to the load bunk. This facilitates the crane’s tasks, by minimizing the crane’s distance of travel. When logs are found, the system stops at a distance where the crane will be able to reach all logs in a nearby area without the necessity to move the vehicle.
7. Lowering the vehicle
At this stage, the vehicles height is lowered so it has a lower centre of gravity and better stability when the crane is moving and carrying logs.
8. Collecting logs
Referring to Figure 4d, at this stage, the crane’s motion control system plans the necessary trajectories to reach the logs and load them into the load bunk. From this point, the sequence starts all over again from step 2 and ends when the last waypoint or by manual means.

Navigation control
The machine navigates between an initial and destination by following a trajectory that connects GPS waypoints. In this study a straightforward approach was used based on the direction of the machine’s front end. The algorithm calculates the difference between the bearing of the current waypoint and the heading of the machine’s front end and feeds this information into a P controller that determines the desired rate of steering angle. The controller then sends this information to a hydraulic valve that controls the cylinders that adjust the articulation angle. When the machine approaches a certain distance from the waypoint (based on the machine’s steering radius), it switches to the next.
Tests were conducted to verify the machine’s ability to autonomously navigate by defining waypoints in GPS format. These tests consisted of defining a rectangular path defined by four waypoints and let the machine traverse this route for four consecutive laps. To evaluate the robustness and converge to the same path from different initial conditions, the machine’s initial position was changed for each new test sequence.
To conduct this research, the team has developed and invested in a testbed infrastructure based on a dedicated autonomous off-road vehicle platform with weight of ten ton and can carry a payload of about three ton. Modular chassis enable different units to be replaced to fit certain research. Four individually pendulum arms are attached to the chassis. These arms can be actively (and individually) controlled or passively through a float control valve connecting positive and negative ports of left- and right-hand side pendulum arm cylinders. Due to the modular design, the drivetrain and the auxiliary equipment can easily be reconfigured.
The platform is equipped with proprioceptive sensors logging all relevant internal properties such as positions, pressures, velocities and accelerations in addition, the platform has been equipped with exteroceptive sensors enabling sensing of the surrounding environment and positioning. The infrastructure also includes a load changer truck carrying a customized can be fitted thus enabling flexibility to perform tests in different environments.
To process the data gathered in real time, dedicated GPU: s is used. In addition, a powerful I/O processing unit is used for management of signals and execute algorithms. The software architecture is based on Robot Operating System (ROS), Matlab/Simulink, Python and C.
“With the AORO testbed, autonomous technology will be developed to significantly improve the sustainability of utility vehicle activities in off-road environments,” said Magnus Karlberg, professor in machine design at Luleå University of Technology.

Forest Machine Magazine is written and edited by a forest professional with over 40 years hands on experience. We are dedicated to keeping you informed with all the latest news, views and reviews from our industry.
To support us you can subscribe to our bi-monthly magazine which is delivered to your door from only £15 per year.
Subscribe here
#homeoflogging #writtenbyloggersforloggers #loggingallovertheworld